Kurven fahren
Start

Der Roboter soll sich um 90 Grad umdrehen
Kurve

Der Roboter soll nach links und rechts fahren
Ziel

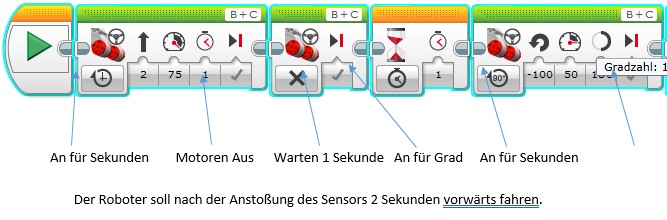
Der Roboter soll nach der Anstoßung des Sensors 2 Sekunden vorwärts fahren
Der Roboter soll sich um 90 Grad umdrehen
Der Roboter soll nach links und rechts fahren
Der Roboter soll nach der Anstoßung des Sensors 2 Sekunden vorwärts fahren